Overview
As part of the dual degree MS/MBA program at Harvard, teams of three students were required to build an embedded system during a three-day sprint. My team built a ‘soft robotic' – without use of rigid links – grasper that could identify proximity to an object and automatically initiate a gripping motion to pick up objects of assorted shapes and sizes without causing damage to the objects.
Context
By January 2020, the time of the project, warehouse automation was gaining a lot of momentum, but the task of picking and packing small objects was still not feasible for robotics [1]. For instance, Amazon warehouses had been outfitted with automated vehicles capable of delivering parcels to and from locations, but the process of picking and packing still needed to be performed largely by humans. The reason is that warehouse picking is more complicated than you’d expect, requiring a huge amount of reasoning and sensorimotor skills to manipulate small, irregular objects without damaging them.
Requirements and Specifications
To solve the challenge of warehouse picking, our team generated the following list of requirements and specifications to be met for a robotic grasper.
|
Requirement |
Specification |
|
Max Grasped Object Dimensions |
2” x 2” x 2” |
|
Min Grasped Object Dimensions |
1” x 1” x 1” |
|
Object Shape |
Can pick up a variety of shapes with at least one right-angled edge (ex: cube, rectangular prism, cylinder, can). |
|
Sensing |
Detect when objects are beneath the grasper and when the grasper is in contact. |
|
Simple Actuation |
A gantry will control the actuation in 2-dimensions. |
|
Gripping Force |
Lifts objects less than 2 lbs. |
|
Price |
Less than $300 (actual cost of prototype was $225) |
Solution
While it might seem intuitive to build a robotic version of a human hand, our team determined that in fact the best solution would be to create a ‘soft robotic’ end effector. Soft robotics is a relatively recent field of robotics that uses compliant materials rather than rigid components. The benefit of a soft robotic end effector is that, if designed correctly, it can mold and fit the contours of irregular objects with a lower risk of damaging the object. Specifically, the end effector used was a simple vacuum-sealed bag of rock salt. After molding around an object, a pump creates a vacuum in the bag of rock salt to make it rigid and apply force on the side of the surrounded object.
The sequence of steps that our robotic grasper took to pick up objects was the following.
- Scan the environment and identify the object using computer vision (written by my teammate Alec Meade).
- Move the robotic arm above the object and apply downward force until a pressure limit is reached.
- Actuate the vacuum pump to evacuate air in the rock salt bag.
- Lift the object via the gantry.
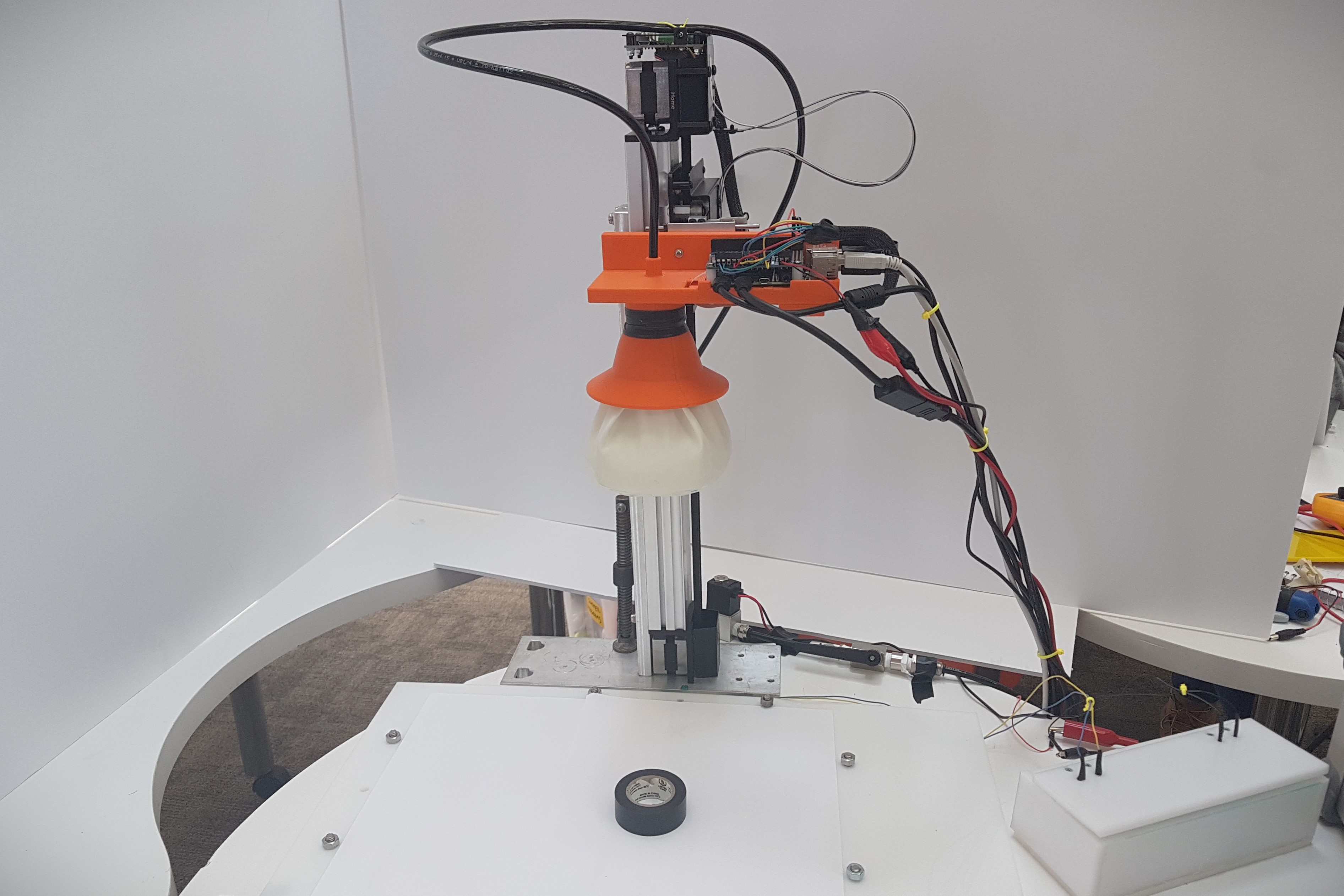
Shown below is a diagram of our robotic grasper design and an example video of it picking up a roll of tape.
This project highlighted the surprising challenges in robotics when a high degree of fidelity and reliability (like preventing damage to any form of object) is required.
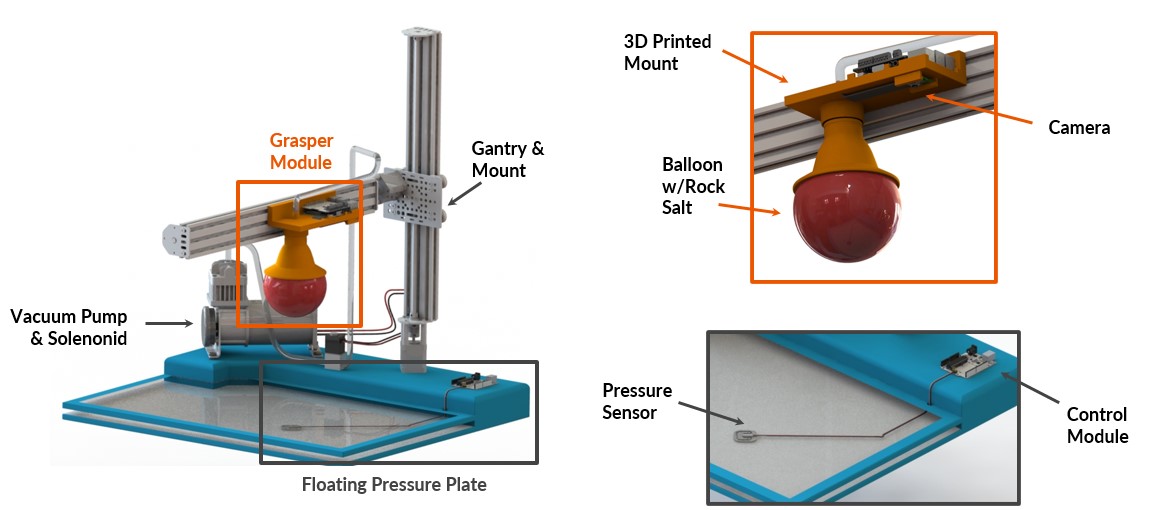
Figure: A CAD drawing of our robotic grasper, with the main components annotated.
Video: A sample clip of our robotic grasper picking up a small roll of electrical tape (circular objects were the among the hardest to pick up because of the generally shorter length of right-angle edges).
References
[1] https://multichannelmerchant.com/blog/human-warehouse-picking-still-has-it-all-over-robots/

